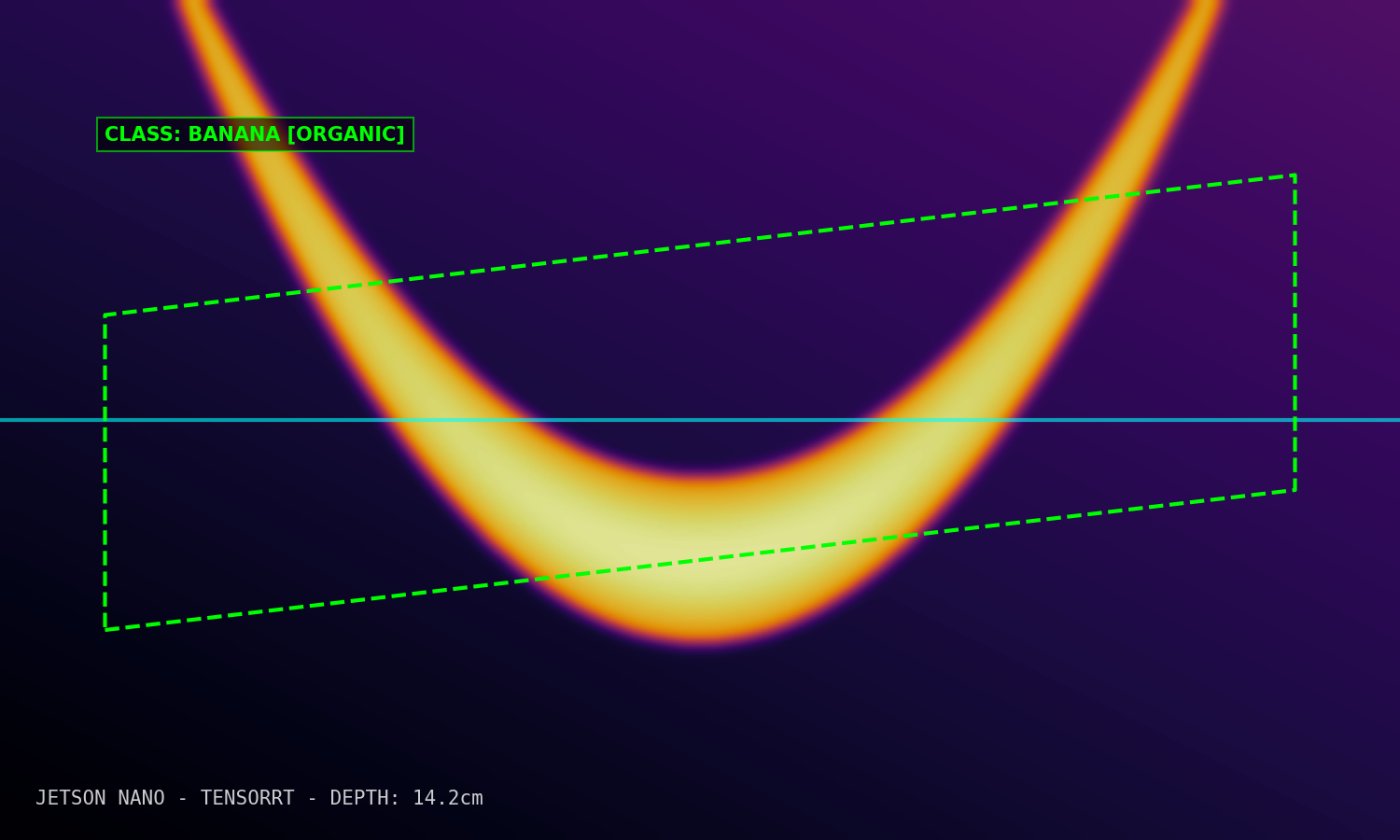
Depth Estimation (Edge AI)
Real-time monocular depth estimation deployed on NVIDIA Jetson Nano edge hardware measuring continuous spatial topography.
Monocular Environment Mapping
LiDAR arrays are expensive and power-hungry. This project successfully replaced physical LiDAR hardware with a singular RGB camera and an optimized neural network running on edge constraint logic.
Edge Native
Fully optimized to run on a 5W power budget via Jetson Nano.
Zero-LiDAR
Calculates depth gradients using only mathematical RGB displacement.
TensorRT Graph
FP16 inference providing drastic performance boosts.
Technical Strategy
Deploying state-of-the-art vision transformer models to edge IoT devices requires deep architectural quantization.
MiDaS Pruning
Took the standard MiDaS depth model and pruned layers with low-attention weights to reduce model size by 65%.
INT8 Quantization
Utilized NVIDIA TensorRT to quantize the payload to INT8 architectures ensuring maximal throughput on the Jetson GPU.
C++ Inference API
Bypassed Python entirely in production, wrapping the TRT engine in a C++ API for zero-copy memory transfers over V4L2.